


dwilfong
Well-Known Member
- Joined
- Jul 1, 2008
- Messages
- 5,968
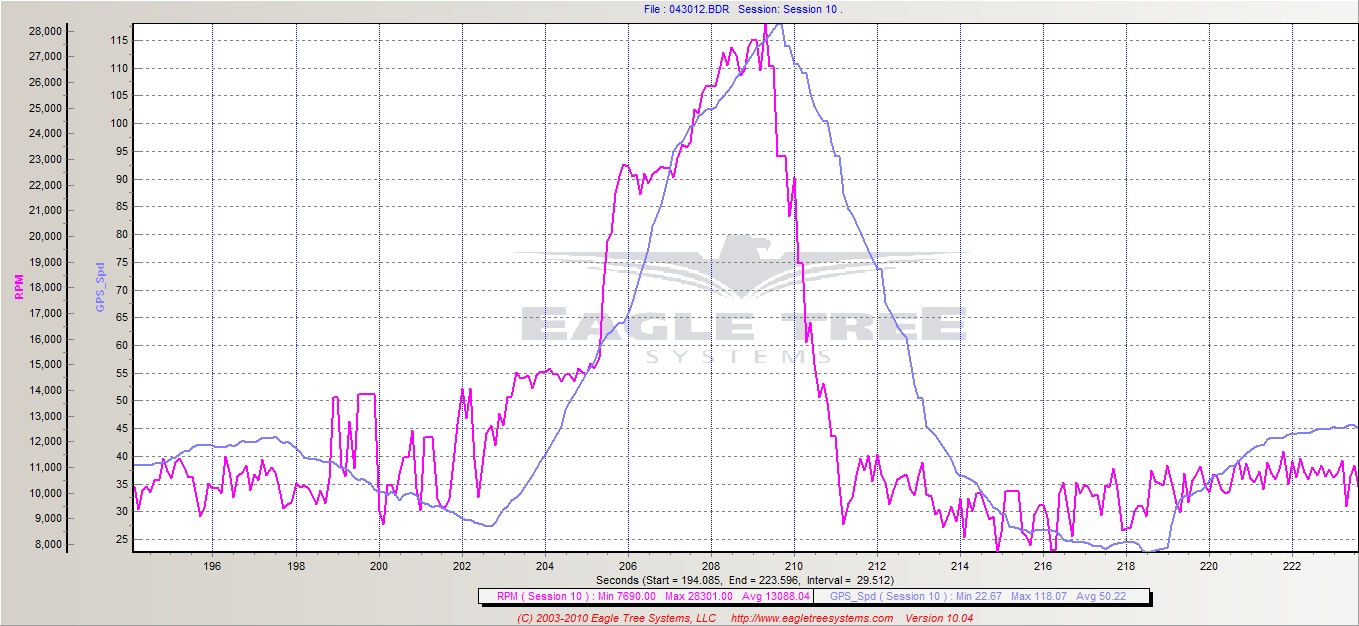
Yes it is funny that as soon as the boat catches up to the eng it gets erratic.It could be the motor to some extent but it's mostly "noise" IMHO. I'm only using 10 hz here as that's what the LCD panel wants, but I have tried 50 hz and it's not much better.
I doubt a motor could actually jump from 9-14K in 0.1sec. unless it's hitting the pipe. (199.9 - 200.0 sec.).
Funny tho it is pretty smooth coming on pipe from 15-23K.
")
Might need a little more load on the eng.
Last edited by a moderator:

